Цитата:
Сообщение от nikolaj

Разъясни про избыточную и недостаточную.
В моем понимании недостаточная- это когда машина стремиться наружу поворота
|
Любая машина стремится наружу поворота в кювет по законам физики. )))
Про поворачиваемость здесь можно страниц десять написать, потому что связана она с геометрией и кинематикой подвески и рулевого управления, боковым уводом шин и т.д.
Вкратце:
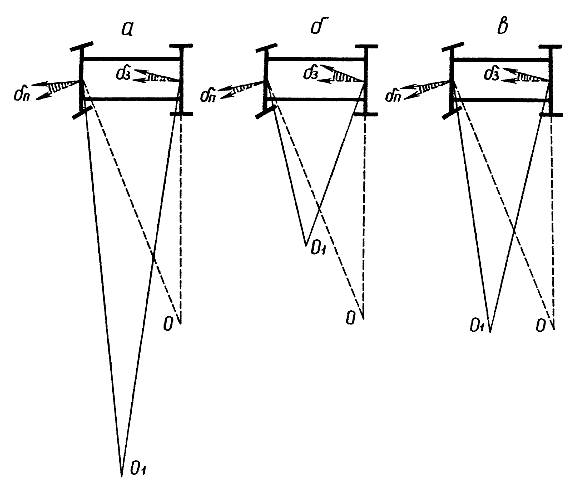
Три случая статической поворачиваемости: δП – угол увода передних колес, δЗ – угол увода задних колес, О — центр заданного радиуса поворота, О1 — центр изменившегося радиуса поворота. Пунктиром показаны направления и радиусы, заданные водителем, сплошными линиями — изменившиеся вследствие увода шин.
а — недостаточная поворачиваемость: угол увода передних колес больше, чем задних; радиус поворота увеличился против заданного.
б — избыточная поворачиваемость: угол увода передних колес меньше, чем задних; радиус поворота уменьшился против заданного.
в — нейтральная поворачиваемость: углы увода передних и задних колес одинаковы, радиус поворота не изменился.
Это упрощённо "в статике". Плюс сюда же уводы подвески и рулевого в следствие кинематики и податливости в шарнирах.
Как пример рессорная подвеска:
http://offroad38.ru/tuning_monstrohod_ressorizad.php
Вот здесь интересное обсуждение (рассматривается увод шин, но вообще уводом называется "весь комплекс" - изменение параметров подвески и рулевого управления в динамике).
http://beemdoubleu.livejournal.com/199931.html